5G-Aͨ���W(w��ng)�j(lu��)�������~������Ҏ(gu��)ģ���O(sh��)�A�Σ��x����m��ͨ��վ�c(di��n)���Ǯ�(d��ng)ǰ���̽��O(sh��)������Ҫ�Ĺ���֮һ�������P(gu��n)�I���g(sh��)�IJ��ͨ�оW(w��ng)�j(lu��)�cͨ�žW(w��ng)�j(lu��)��(du��)��վ�c(di��n)�x���Ҫ������^�������y(t��ng)ͨ�žW(w��ng)�j(lu��)��վ�c(di��n)�x���g(sh��)���߲����m����ͨ�оW(w��ng)�j(lu��)��
��(du��)��ͨ�оW(w��ng)�j(lu��)���o(w��)����̖(h��o)����Ҫ��l(f��)�䲨�c��֪Ŀ��(bi��o)�ķ���ز���ҕͨ·����LOS������վ�c(di��n)�쾀�c��֪Ŀ��(bi��o)֮�g�o(w��)�������ҕͨ·���£��o(w��)����̖(h��o)��������(du��)��(w��n)�������A(y��)�y(c��)�������ھ���(zh��n)Ӌ(j��)���֪Ŀ��(bi��o)�ľ��x���ǶȺ��ٶȵȅ���(sh��)����ˣ�ͨ��վ�c(di��n)һ��Ҫ��������߅�o(w��)�ړ����_韵؎����ԱM���ܵ�?c��i)U(ku��)��ҕͨ·�����_(d��)�ą^(q��)����Ҳ����վ�c(di��n)�ĸ��w���������ڬF(xi��n)�W(w��ng)������ͨ��վ�c(di��n)�У������ஔ(d��ng)��ռ�ȵķ�ҕͨ·���������ڽ������ܼ��ijDž^(q��)�����鹤�̎���Ҫ�ڬF(xi��n)�W(w��ng)����(g��)���xͨ��վ�c(di��n)�У���(j��ng)�^(gu��)�����ҕͨ�����u(p��ng)�������ܴ_��һ��(g��)���m��ͨ��վ�c(di��n)�������ه���y(t��ng)վ�c(di��n)����ͷ����u(p��ng)������ģʽ��ͨ��վ�c(di��n)Ҏ(gu��)�������ĵ������͕r(sh��)�g�ɱ�����(hu��)�h(yu��n)�����y(t��ng)ͨ��վ�c(di��n)����ˣ��������վ�c(di��n)�����ҕͨ�����u(p��ng)�������w����Ч�ʣ���ͨ�оW(w��ng)�j(lu��)���O(sh��)�б��Ҫ��Q�Ć�(w��n)�}��
���ˑ�(y��ng)��(du��)��������(zh��n)�����dͨӍ���ǾW(w��ng)�j(lu��)ƽ�_(t��i)���Ƅ�(d��ng)��������վ�c(di��n)����ͷ����u(p��ng)���Ĺ������̣���(sh��)�F(xi��n)��һ����վ�������]�h(hu��n)������(chu��ng)���˼��r(sh��)վ�c(di��n)����ͷ����ȫ�¹���ģʽ���O�������˹���Ч�ʡ�
��(du��)���y(t��ng)վ�c(di��n)���鹤��ģʽ�ĸ��M(j��n)����
���y(t��ng)ͨ�žW(w��ng)�j(lu��)��վ�c(di��n)���鹤���������£�
�� ���鹤�̎���վ�c(di��n)����ɼ�վ�c(di��n)��(j��ng)���ȡ������Ȕ�(sh��)��(j��)�����Ĕz�h(hu��n)����Ƭ��
�� ���鹤�̎��ɼ�����(g��)���xվ�c(di��n)����Ϣ���غ�����(sh��)��(j��)���o�����ˆT��
�� ���湤�̎�ͨ�^(gu��)���湤�ߌ�(du��)���xվ�c(di��n)�M(j��n)�и��w���棬�ж��Ƿ��x���վ�c(di��n)��
�����������У�����ͷ����u(p��ng)���ڃɂ�(g��)��ͬ�Ĉ�(ch��ng)�������ϲ������������̔��c(di��n)������(hu��)�������(w��n)�}��
�� �������Y(ji��)���ж����еĺ��xվ�c(di��n)�����m�ϣ����鹤�̎���Ҫ���·��جF(xi��n)��(ch��ng)�������µĺ��xվ�c(di��n)��
�� ���湤�̎�ֻ��ͨ�^(gu��)��Ƭ�_��վ�c(di��n)�ğo(w��)�������h(hu��n)����Ϣ����������ďV�����ړ������п��������Ϣ���z©�����`�У��Ķ��õ��e(cu��)�`�ķ���Y(ji��)Փ����ʹ����ͷ��湤�̎���ͬһ�ˆT��Ҳ�п����ڷ����аl(f��)�F(xi��n)�����z©����Ϣ����Ҫ�ٴ���վ���顣
�@Ȼ�����̵Ĕ��c(di��n)��(hu��)��(d��o)���؏�(f��)��������Ӱ�վ�c(di��n)�x��Ĝ�(zh��n)�_�ȡ���(j��ng)�^(gu��)���̷�������վ�c(di��n)����ͷ��湤���M(j��n)�����ϣ���վ�c(di��n)�����ϼ��r(sh��)��Ч�����ȫ���������Ϳ����������c(di��n)����������Ч�ʡ�
���r(sh��)վ�c(di��n)����ͷ��摪(y��ng)��Magic Planner
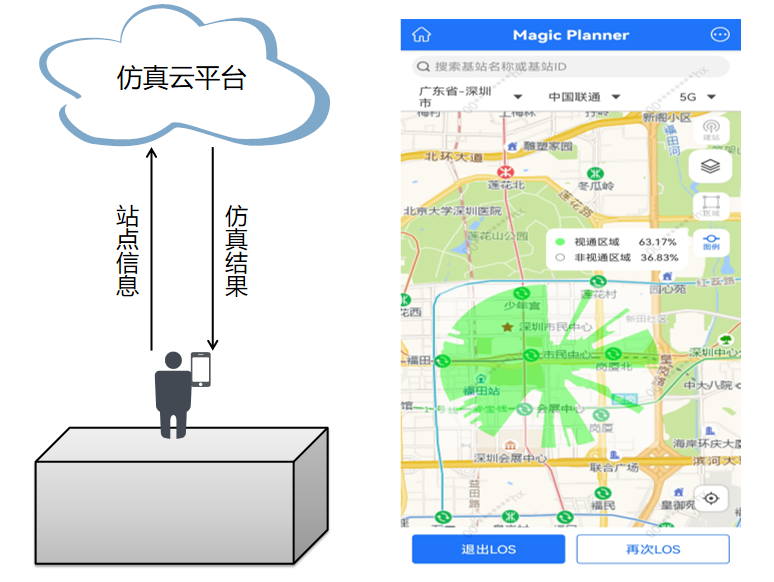
�D1 Magic Planner�������̺��Ñ�����
�b������ͨ�оW(w��ng)�j(lu��)վ�c(di��n)������������dͨӍ���ǾW(w��ng)�j(lu��)ƽ�_(t��i)�Ƴ����Ƅ�(d��ng)�ˑ�(y��ng)��Magic Planner��Magic Planner�߂����¹��ܣ�
�� ֧���Ñ����Ƅ�(d��ng)�˲����������ͨ�оW(w��ng)�j(lu��)�ķ����(xi��ng)Ŀ�����ɷ�����ƽ�_(t��i)���Ӌ(j��)���΄�(w��)��
�� ֧��ᘌ�(du��)ͨ��վ�c(di��n)ҕͨ���w�����ķ����A(y��)�y(c��)��֧���Ԅ�(d��ng)�xȡ�K��λ�Þ�վ�c(di��n)λ�á���ģ���O(sh��)�Å���(sh��)���Ԅ�(d��ng)��������
һ��(g��)ʹ��Magic Planner��ͨ��վ�c(di��n)���鹤���������£�
�� ���̎���վ�c(di��n)�������^���m�ϰ��b�쾀��λ�ã����Ƅ�(d��ng)����λ�ã�
�� ���_Magic Planner���Ԅ�(d��ng)��λ����(d��ng)ǰλ�ã��O(sh��)��Ŀ��(bi��o)��߶Ⱥ�ҕͨ�����돽��
�� �c(di��n)��ҕͨ�A(y��)�y(c��)���ܣ��ȴ��\(y��n)�нY(ji��)���鿴�����ϵ�ҕͨ�ͷ�ҕͨ�^(q��)���Д��Ƿ����Ҫ��
���ˌ�(du��)վ�c(di��n)λ�õĺ������Д࣬��������߀֧��(du��)�쾀�߶ȡ���λ�Ǻ��A�ǵȅ���(sh��)�ĬF(xi��n)��(ch��ng)�O(sh��)Ӌ(j��)�ͷ����u(p��ng)����ͬ�r(sh��)��Magic Planner�����M(j��n)һ���ṩ����ͨ�ź�ָ֪��(bi��o)�ķ���Y(ji��)�����������̎�ȫ���˽�ԓվ�c(di��n)�����ܱ��F(xi��n)��
��(y��ng)��(sh��)�`
Magic Plannerͨ�з�����ij5G-A�(xi��ng)Ŀ�ĸߘǵͿՅ^(q��)���(y��n)�C�У�17288��(g��)��֪�ψ�(b��o)�c(di��n)�c����ҕͨ�^(q��)���ƥ�����_(d��)��99.8%���C��(sh��)ҕͨ���湦�ܿ��á�
��(d��ng)ǰ��Magic Planner�ѽ�(j��ng)��ͨ�оW(w��ng)�j(lu��)��վ�c(di��n)������x��������ؑ�(y��ng)�ã�ʹ�����w����Ч������70%����Q��ͨ�оW(w��ng)�j(lu��)Ҏ(gu��)ģ���O(sh��)��ƿ�i��(w��n)�}��
�ڟo(w��)���W(w��ng)�j(lu��)���O(sh��)�����У��½�վ�c(di��n)�Ŀ��顢������x��һֱ�������͕r(sh��)�g�����^�ߵĭh(hu��n)��(ji��)��Magic Planner�Ĺ���ģʽҲ������������ʽ�W(w��ng)�j(lu��)�Б�(y��ng)�ã������W(w��ng)�j(lu��)���O(sh��)���Ԅ�(d��ng)���̶ȡ���ه���dͨӍ��5G-A���g(sh��)�Ą�(chu��ng)��ͻ�ƣ��Լ�5G-A�W(w��ng)�j(lu��)���O(sh��)��(j��ng)�(y��n)�ķe�ۣ����dͨӍ5G-A���湤������ͻ�Ƃ��y(t��ng)�Ĺ���߅�磬��(chu��ng)���µĹ���ģʽ������5G-A�W(w��ng)�j(lu��)���O(sh��)��