���գ����K�Ƅӡ��Ƅ��о�Ժ�����A���ڟo�a�������܇·��һ�w���ĺ��ľW��Դ�ں���֪���gԇ�c����ԓ���g��ȫ���״Ό��F�c܇�W�ĽY�ϑ��ã�ͻ�Ƃ��y��֪�c5G-Aͨ��߅�磬��܇·�ƘI���ṩ�ɿ����`��͕r�ӡ��߾��ȵ��ںϸ�֪��Q��������־���Ї��Ƅ���5G-Aͨ�������x�܈������������~����Ҫһ����
��؞���䌍������Դ��܇�a�I�lչҎ����2021-2035�꣩�������k�l��2020��39̖�����ƄӾW�ƿػ��A�Oʩ���O���ӿ����ܾW��܇���gͻ�ƺͮa�I���lչ�����Ų����岿ί�l�����_չ���ܾW��܇��܇·��һ�w��������ԇ�c��������֪ͨ���Ƅ����P�Ŀ����־��܇·�Ʈa�I�����^ȥʾ���^��ʽ��СҎģ������C���~����м���Ҏģ�����˜ʻ����̘I������،��`���^�������R�T������
���^ȥ���辰��ʽ�Ľ��O�������Ƶ��������У����O�ɱ��^�ߡ�
Ӌ���O�䲿�������⣬�ɿ����½��Ҳ����ڼ����\�S��
���֪Դ�����|������R����ģ�B����s�h���¸�֪�������ͣ��Ү�ǰ�ړ��Ͷ�Ŀ�˭h�����ڸ�֪ä�^���o���M��܉�E������ۙ��
�ܘI�Ո�������������YԴӰ푣��ڵͿա�܇·�ͺ���Ȉ��������ö��ƻ�������Ӌ��ɱ��ߡ�
ᘌ�܇·��һ�w����������،��`�е����𣬽��K�Ƅ��c�Ƅ��о�Ժ���A�飬����˻��ں��ľW���Ɇ�Դ��վ���_��֪���Դ�ںϸ�֪���M�ļܘ���·������܇·��һ�w���ṩ�ͳɱ������\�S�������ܵĸ�֪������
�yһͨ�оWԪ��������������{�ȿ�ܺͶ�Դ�ּ��ںϸ�֪ģ�ͣ����֪���Ⱥ�AI�������������Fһ��ͨ�оWԪͬ�r�����ڵͿա�����܇·�ȶ�����������Q��֪�΄ա�AIģ�ͺ������g��Ч�fͬ�{�Ȇ��}��
��ҕ��ģ�ںϣ�ͬ�r֧��3GPP��֪Դ(��վ��֪)�c��3GPP��֪Դ(�z��C���������_��) ������·���B�ҕ�D���������ںϷ�������Q�h̎СĿ���R�e�y�����s����̓���ߵȼ��g�y�}��
�r���P�A�y��ۙ�������Ŀ�˔���ƥ�䡢���c�ڱν��m�Լ����R�^�P�ȕr���A�y��ۙ�㷨����Q���ړ�/늴������£�Ŀ���R�e��λ���܉�E���m�y�ļ��g����
����߅�������ṩ���߿ɿ��ԡ��O���\�S�͏�����s���������F·���\�S�����Ľyһ�\�S���M�����������`���
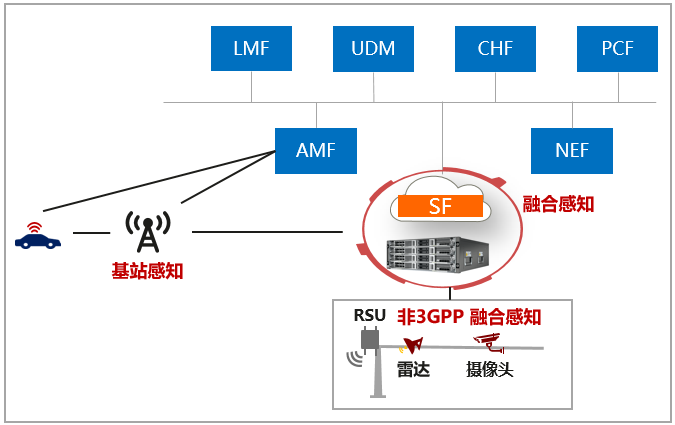
�D1������܇·��һ�w���ĺ��ľW��Դ�ںϸ�֪�ܘ�
�����������·��������K�Ƅ��ڟo�a���L·-���µ����ԇ�c��C���״Ό��Fҕ�l�����ײ����_�ͼ������_�ȶ�Դ��֪�������ں��cӋ�㣬����ͨ���c�ߣ�܇�v/�T����/����/�ϵK��c��ͨ�¼�����������/����/��̽�^/����/����ͣ܇���ȘI�Ո����܉��M�и߾��Єe��ԇ�Y���_��SL2(��֪�ȼ�)ˮƽ���M��܇·��һ�w���o���{�������m���ڴ˻��A���Mһ����C��վ��֪�c��ģһ�w���fͬ���h����֪�ȼ��g���ںϼ����ã�Ŀ���_��SL3ˮƽ���M��܇·��һ�w���Ԅ��{�����
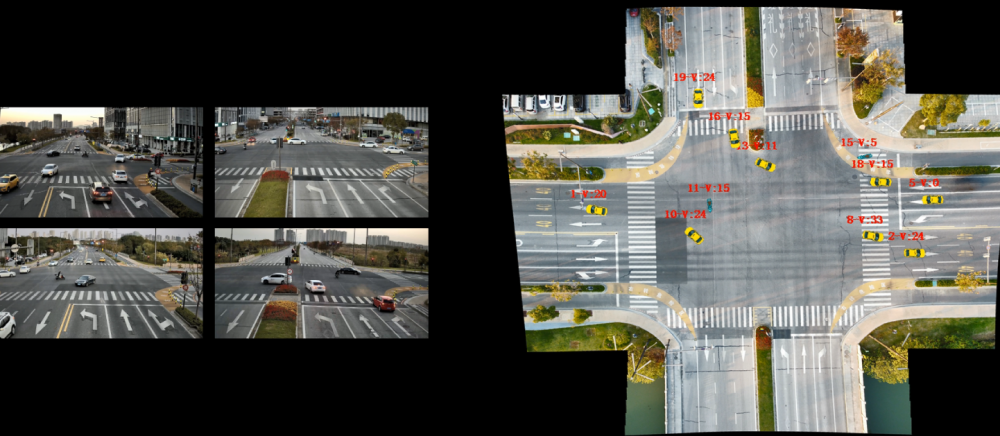
�D2���o�aԇ�c��֪Ч����ʾ
δ�����S��5G-Aͨ�м��g���Mһ�����죬�Ƅ�ͨ���W�j��ͻ�Ƃ��y�B��߅�磬�����M�鼯ͨ�š���֪��Ӌ�㡢������һ�w�ĺ����ИУ��������W�j���������������ͻ��A�Oʩ��ʽ����������ͻ�Ƹ�֪���ՏĆ�һ�������S�fͬ�Ŀ�Խ���ڑ��È����ό��F��܇·����Ϳա����������ȫ������M�����҇����ֽ������|���lչע�����ܡ�